T-RO23: Bio-Inspired Cable-Driven Actuation System for Wearable Robotic Devices: Design, Control and Characterization
Published in IEEE Transactions on Robotics, 2023
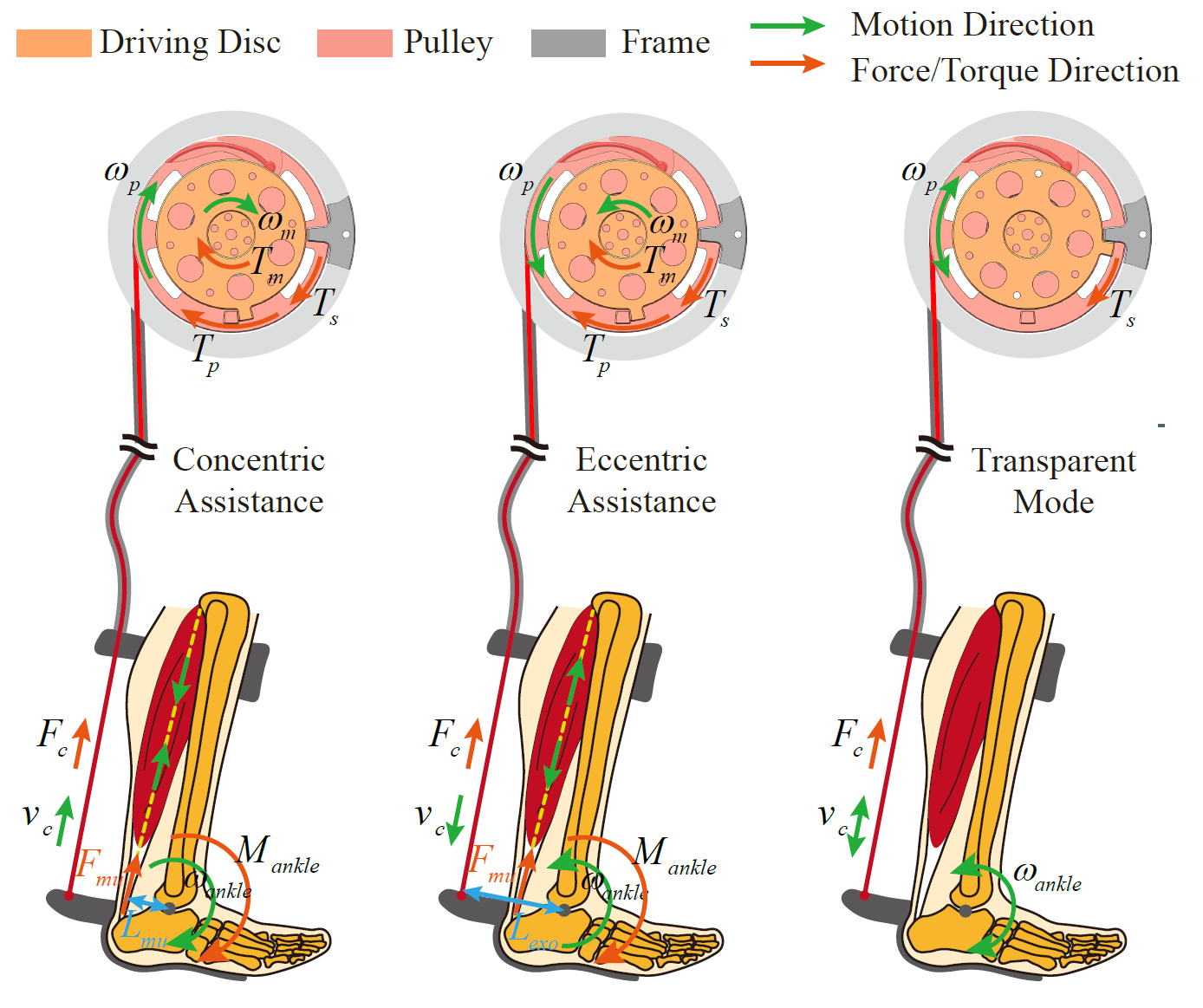
Abstract Wearable robotic devices interact with human by applying assistive force in parallel with muscle-tendon systems. Designing actuations in mimicking the natural activation patterns of human muscles is a promising way to optimize the performance of wearable robots. In this paper, we propose a bio-inspired cable-driven actuation system capable of providing anisometric contractions (including concentric and eccentric contraction) assistance or nearly acting as a transparent device in an efficient manner. A novel clutch-spring mechanism is employed to accomplish switches between assistive modes and the transparent mode. Corresponding control strategies coordinating with the mechanical design were presented and described in detail. Multiple evaluations were conducted on a test bench to characterize the system performance. The closed-loop bandwidth of the system running concentric assistance control was 18.2 Hz. The R-squared values of linear fitting under eccentric assistance control were above 0.99. The engagement time of the proposed clutch was about 90 ms. Applying the actuation to an ankle exoskeleton, multiple walking experiments with electromyography measurement were performed on five subjects to show its application potential in existing wearable robots. Experimental results revealed that the proposed design could reduce soleus muscle activity by 27.32% compared with normal walking. This study highlights the importance of functional bionic design in human-assistance-related devices and introduces a general actuation system that could be directly applied to existing cable-driven wearable robots.