MECH23: Control and Experiments of a Novel Tiltable-Rotor Aerial Platform Comprising Quadcopters and Passive Hinges
Published in Mechatronics, 2023
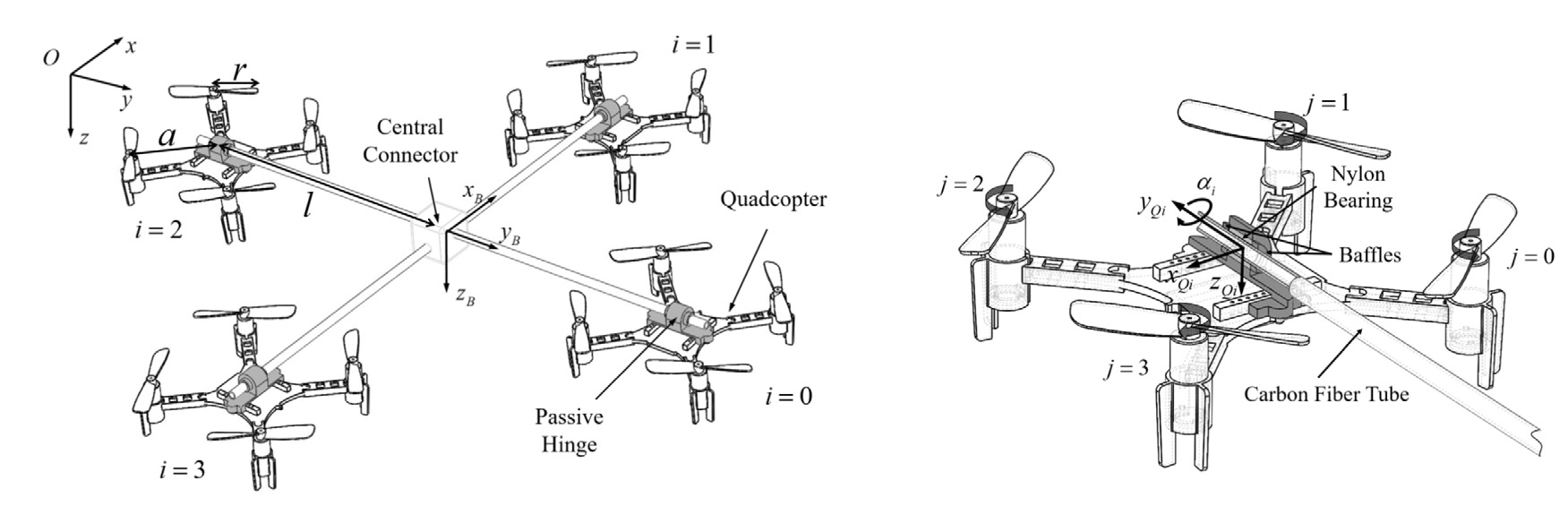
Abstract This paper presents the control and experiments of a novel multirotor aerial platform, which is capable of full actuation for six Degree of Freedom (DoF) motions. The platform is actuated by a number of tilting-thrust modules, each consisting of a regular quadcopter and a mechanically passive hinge. The platform in this paper has four such actuator modules, making an over-actuated system that requires input allocations in the feedback control. In addition to the common least-square method that minimizes the sum of squares of the thrusts, we propose a control allocation that minimizes the maximum thrust in a closed-form analytical solution for efficient real time computation. This allocation can achieve larger inclination angles than that by the least-square method, when thrust forces are insufficient to overcome the gravity for all poses. Simulation and real world experiments are presented to demonstrate the control of the aerial platform for six DoF motion tracking and disturbance rejection.